

Idee und Ziel
Bei den heutigen steigenden Energiepreisen muss das produzierende Gewerbe den Energieverbrauch der Produktionsressourcen selbst berücksichtigen, wenn sie bestimmte sequenzielle Aufgaben ausführen und gleichzeitig die Produktivität optimieren. Wir haben einen Roboterarm-Demonstrator entwickelt, dessen Aufgabe es ist, sich bewegende Farbblöcke auf einem Förderband gemäß einer vorgegebenen Farbblock-Klemmsequenz in einen Zielbereich anzuordnen. Ziel ist, auf der Grundlage von Reinforcement Learning verschiedene optimale Greifstrategien zu finden, die den unterschiedlichen Anforderungen an Produktivität und Energieverbrauch des Roboterarms flexibel gerecht werden können.
Beschreibung
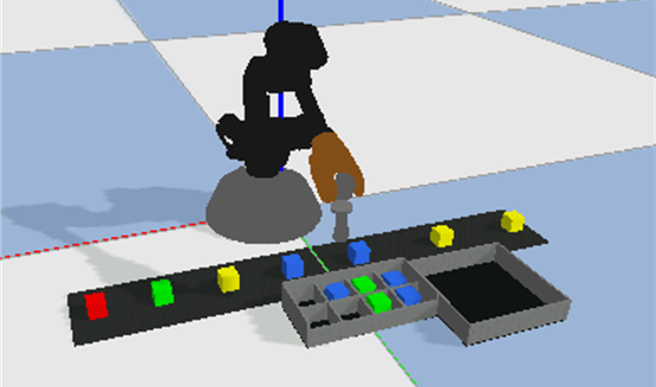
Bei dieser Demonstrationsaufgabe soll der Roboterarm so viele farbige Blöcke wie möglich in einer vorgegebenen Farbreihenfolge von einem sich bewegenden Förderband aufnehmen und sie innerhalb einer bestimmten Zeit in einem bestimmten Zielbereich ablegen, wobei die Blöcke nicht vom anderen Ende des Förderbandes herunterfallen sollen. Außerdem wollten wir den Energieverbrauch des Roboterarms während der gesamten Aufgabe minimieren. Da die Farbe der Blöcke, die auf das Förderband einlaufen, zufällig ist, haben wir einen Puffer-Zone in der Nähe des Zielbereichs entworfen. Dort können Blöcke vorrübergehend platzziert werden, um das Herunterfallen vom Förderband zu vermeiden. Der Roboterarm kann den nächsten Block der Zielfarbe direkt aus der Puffer-Zone aufnehmen. Der trainierte RL-Agent analysiert intelligent die Position des Blocks sowie den Energieverbrauch der Roboterarm-Aktion und bestimmt nach Abschluss der letzten Greif-Platzier-Aktion des Roboterarms, welcher Farbblock auf dem Förderband oder der Pufferzone im nächsten Moment gegriffen werden soll.
Hauptkomponenten
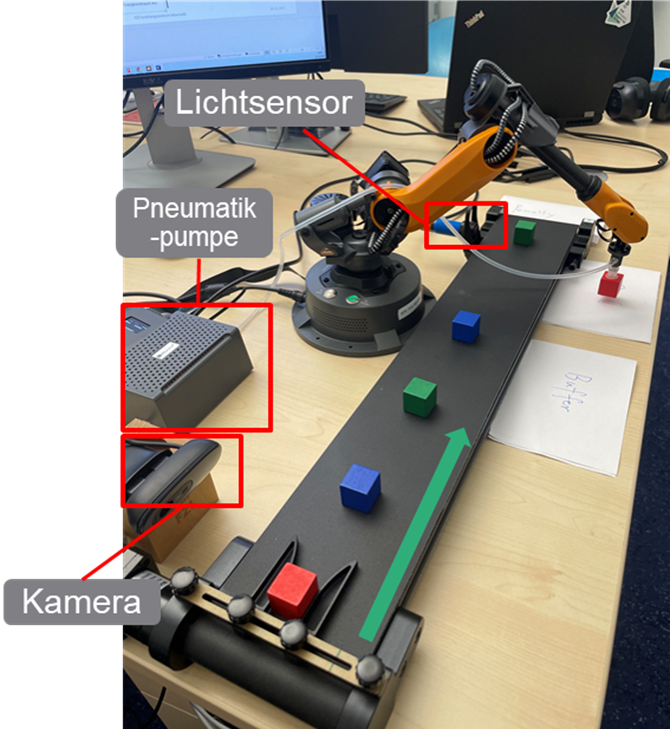
- Roboter: Arduino-basierter WLKATA 6-achsiger Roboterarm
- Förderband: läuft mit konstanter Geschwindigkeit.
- Blocks: manuell auf das Förderband gelegt, zufällig gefärbt, mit Zeitabständen von 2 bis 4 Sekunden zum vorherigen Block.
- Kamera: dient zur Erkennung der Anfangsinformationen der Würfel.
- Lichtsensor: erkennt heruntergefallene Würfel, um sie aus der Liste der Würfel auf dem Förderband zu entfernen.